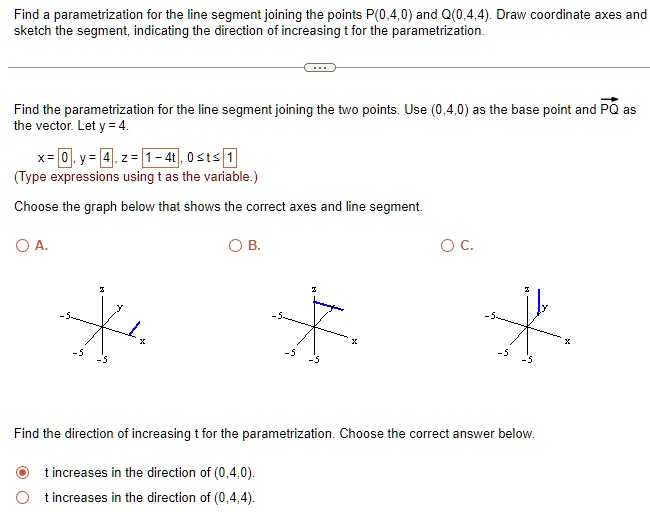
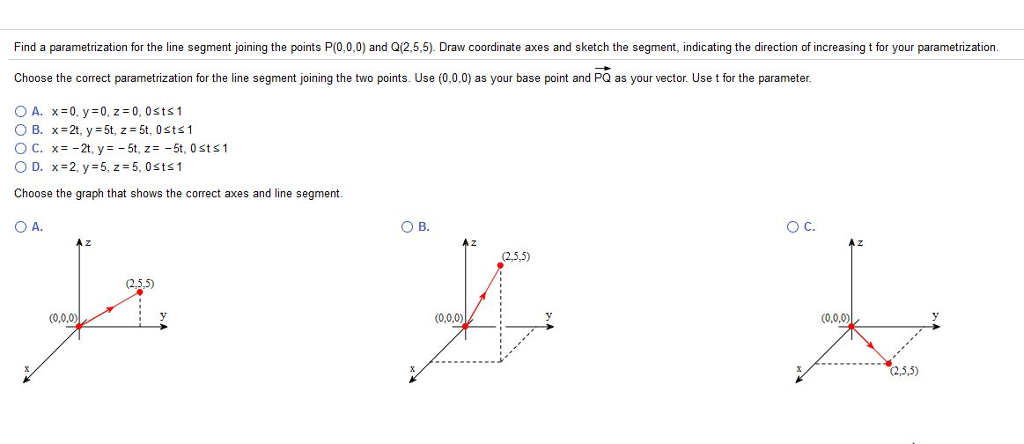
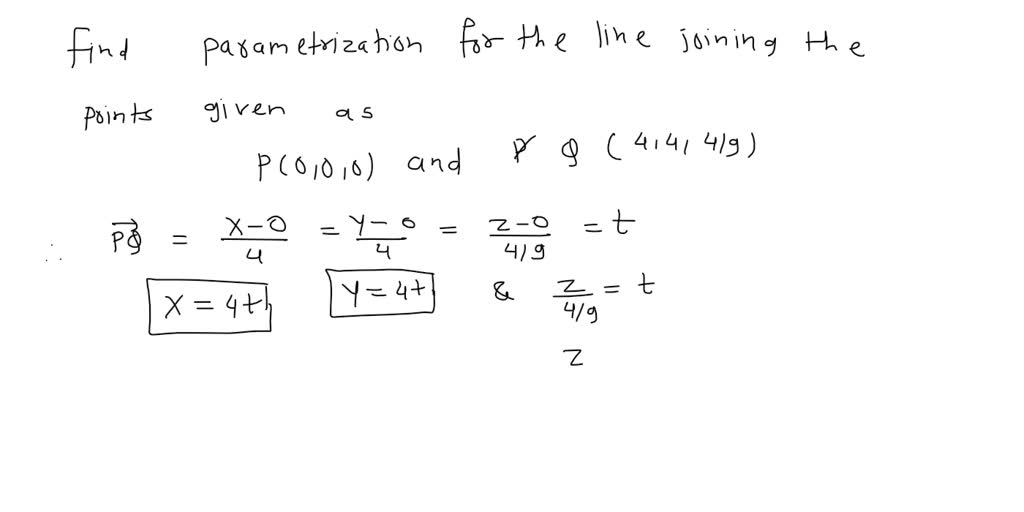
Find A Parametrization For The Line Segment Joining The Points
Hey there, fellow adventurers in the land of math! Ever found yourself staring at two points on a graph, like they're just chilling there, and thought, "Man, I wish I could describe everything that happens between them"? Well, guess what? You totally can! Today, we’re going to talk about finding a parametrization for a line segment. No, it’s not as scary as it sounds. Think of it like getting a backstage pass to the journey between two points.
So, what in the world is a "parametrization" anyway? Imagine you’re on a road trip. You’re not just at Point A and then suddenly at Point B. There’s a whole journey in between, right? A parametrization is basically a way to describe that journey over time. It gives you a “recipe” to move from your starting point to your ending point, step by step.
Let’s break it down. We’ve got two points. Let's call them P and Q. In the fancy language of math, these are usually represented by coordinates. So, let P be (x₀, y₀) and Q be (x₁, y₁). If we’re in 3D, maybe it’s (x₀, y₀, z₀) and (x₁, y₁, z₁). The principle is the same, it just gets a little more crowded. For simplicity, let’s stick to 2D for now, but know that the magic works in any dimension!
Think of these points as the beginning and the end of a very important mission. Your mission, should you choose to accept it, is to travel from P to Q. How do you do that? Well, you need a direction, and you need to know how far along the path you are. That’s where our parametrization comes in handy. It’s going to be like a little map that tells you exactly where you are at any given moment of your journey.
Let’s start with the vector that goes from P to Q. This is your "direction vector." We find it by subtracting the coordinates of P from the coordinates of Q. So, our direction vector, let’s call it v, will be (x₁ - x₀, y₁ - y₀). This vector basically says, "To get from P to Q, you need to move this much in the x-direction and this much in the y-direction." Simple enough, right? It’s like saying, "Go 5 steps east and 3 steps north."
Now, we need to introduce our "time" variable. In math, we often use the letter 't' for this. Think of 't' as the clock ticking on your road trip. When your trip starts, 't' is usually 0. When your trip ends, 't' is usually 1. This makes things super neat and tidy. So, our parametrization will tell us where we are for any value of 't' between 0 and 1.
Here's the secret sauce: we start at our initial point P, and then we add a fraction of our direction vector v. The fraction we add is determined by our time variable 't'. So, for any given 't', our position on the line segment will be P + t * v.
Let's unpack that a bit. If t = 0 (the very start of our trip), our position is P + 0 * v, which is just P. Ta-da! We're at our starting point. Pretty intuitive, huh?
If t = 1 (the very end of our trip), our position is P + 1 * v. And what is P + v? Well, remember how we defined v as Q - P? So, P + v is the same as P + (Q - P), which simplifies to just Q! Boom! We've arrived at our destination.
What about in between? Let’s say t = 0.5. That means we’re halfway through our journey. Our position will be P + 0.5 * v. This means we've traveled exactly half the distance from P to Q. It's like taking the midpoint! If you remember how to find the midpoint, you'll see the connection. The midpoint is indeed ((x₀ + x₁)/2, (y₀ + y₁)/2). Let's see if our formula gives us that. P is (x₀, y₀) and v is (x₁ - x₀, y₁ - y₀). So, P + 0.5 * v = (x₀, y₀) + 0.5 * (x₁ - x₀, y₁ - y₀) = (x₀ + 0.5(x₁ - x₀), y₀ + 0.5(y₁ - y₀)) = (x₀ + 0.5x₁ - 0.5x₀, y₀ + 0.5y₁ - 0.5y₀) = (0.5x₀ + 0.5x₁, 0.5y₀ + 0.5y₁) = ((x₀ + x₁)/2, (y₀ + y₁)/2). Yep, it matches! Our parametrization formula is our friend.
So, our parametrization for the line segment joining P(x₀, y₀) and Q(x₁, y₁) is given by the vector function: r(t) = P + t * (Q - P) where 0 ≤ t ≤ 1.
If we want to write this out in terms of the x and y coordinates, it looks like this:
Parametric Equations for the Line Segment:
x(t) = x₀ + t(x₁ - x₀) y(t) = y₀ + t(y₁ - y₀) for 0 ≤ t ≤ 1
See? It’s just two simple equations that describe your x and y position as you move along the line segment, based on this magical variable 't'. As 't' goes from 0 to 1, your x and y values will smoothly glide from (x₀, y₀) to (x₁, y₁).
Let’s try a quick example to make sure this isn’t just abstract mumbo jumbo. Suppose we want to find the parametrization for the line segment joining the points A(2, 1) and B(5, 7).
Here, P = A = (2, 1), so x₀ = 2 and y₀ = 1.
And Q = B = (5, 7), so x₁ = 5 and y₁ = 7.
First, let's find our direction vector v = Q - P:
v = (5 - 2, 7 - 1) = (3, 6).
Now, plug these into our parametrization formula:
x(t) = x₀ + t(x₁ - x₀) = 2 + t(5 - 2) = 2 + 3t
y(t) = y₀ + t(y₁ - y₀) = 1 + t(7 - 1) = 1 + 6t
So, our parametrization for the line segment from (2, 1) to (5, 7) is:
x(t) = 2 + 3t y(t) = 1 + 6t for 0 ≤ t ≤ 1
Let’s test it out! When t = 0: x(0) = 2 + 3(0) = 2, y(0) = 1 + 6(0) = 1. We’re at (2, 1), our starting point A. Phew!
When t = 1: x(1) = 2 + 3(1) = 5, y(1) = 1 + 6(1) = 7. We’re at (5, 7), our ending point B. Success!
When t = 0.5 (halfway): x(0.5) = 2 + 3(0.5) = 2 + 1.5 = 3.5, y(0.5) = 1 + 6(0.5) = 1 + 3 = 4. We’re at (3.5, 4). Let’s check the midpoint formula: ((2+5)/2, (1+7)/2) = (7/2, 8/2) = (3.5, 4). It matches!
This is super useful for all sorts of things. Imagine you’re animating something on a screen. You want an object to move smoothly from one spot to another. This is exactly how you’d tell it to do that. Or maybe you’re drawing a path in a video game. This is your blueprint!
What if the points are in 3D? Say, Point C is (1, 2, 3) and Point D is (4, 0, 6).
Here, x₀ = 1, y₀ = 2, z₀ = 3 and x₁ = 4, y₁ = 0, z₁ = 6.
The direction vector v = D - C = (4 - 1, 0 - 2, 6 - 3) = (3, -2, 3).
Our parametrization becomes:
x(t) = 1 + 3t y(t) = 2 - 2t z(t) = 3 + 3t for 0 ≤ t ≤ 1
See? The same principle, just with an extra coordinate to keep things interesting!
Sometimes, the problem might give you a different range for 't'. For example, you might want to describe the segment from P to Q, but only the first quarter of the way. In that case, your 't' would range from 0 to 0.25. Or, you might want to go from P to Q and then a bit further out along the same line. You could extend your 't' range, say, from 0 to 2. The key is that the formula r(t) = P + t * (Q - P) always gives you a point on the line passing through P and Q. The range of 't' is what determines which segment of that line you’re looking at.
It’s also worth noting that the choice of t=0 at P and t=1 at Q is conventional and super convenient. You could define it differently. For instance, you could have t go from 5 to 10, where t=5 is at P and t=10 is at Q. You’d just need to adjust your formula slightly. The key is the change in 't' corresponds to the length or proportion of the segment you're traversing. But honestly, why make things harder than they need to be? Sticking to 0 to 1 is like wearing comfortable shoes – it just works!
So, what have we learned? Finding a parametrization for a line segment is like giving directions to a friendly robot. You tell it where to start, what direction to go in, and how fast to get there (represented by 't'). And the best part? It’s a universal language that works for any two points, in any dimension. It’s a little bit of mathematical magic that lets us describe continuous movement and journeys.
Remember that feeling of accomplishment when you finally solved a tricky math problem? This is it! You've just unlocked the ability to describe not just points, but the entire path between them. It’s like going from a single photograph to a full-length movie scene. So, next time you see two points, don’t just see them as static dots. See them as the beginning and end of an adventure, and know that you have the power to describe every single step of that amazing journey. Keep exploring, keep creating, and keep having fun with math!